
| й »йҹҝзү№жҖ§пјҡ0~20kHz ијёеҮәйҖҡйҒ“ж•�(shГ№)пјҡйӣҷйҖҡйҒ“ ијёеҮәжіўеҪўпјҡж–№жі� зӣёдҪҚе·®пјҡ90Вұ30В° |
зү№й»һ(diЗҺn)жҮ�(yД«ng)з”�
еӮіж„ҹеҷЁиҲҮиў«жё¬(cГЁ)йҪ’ијӘдёҚжҺҘи§ёпјҢз„�(wГә)зЈЁжҗҚпјҢе®үиЈқж–№дҫҝпјҢијёеҮәжіўеҪўжҳҜеҚ з©әжҜ”зҙ„зӮә50пј…е·ҰеҸізҡ„ж–№жіўгҖ�
и©ІеӮіж„ҹеҷЁе…·еӮҷиүҜеҘҪзҡ„дҪҺй »е’Ңй«ҳй »зү№жҖ§гҖӮдҪҺй »еҸҜиҮ�0HzпјҢеҸҜз”ЁдәҺж—ӢиҪү(zhuЗҺn)ж©�(jД«)жў°зҡ„йӣ¶иҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮҸпјҢз”ұдәҺеӮіж„ҹеҷЁеҸҜзөҰеҮәе…©и·Ҝе…·жңүдёҖе®ҡзӣёдҪҚе·®зҡ„иҪү(zhuЗҺn)йҖҹдҝЎиҷ�(hГ o)пјҢеӣ жӯӨеҸҜйҖ�(jГ¬n)иЎҢжӯЈеҸҚиҪү(zhuЗҺn)еҲӨеҲҘпјӣй«ҳй »еҸҜй«ҳиҮі20KHz, еҸҜж»ҝ(mЗҺn)и¶ізө•еӨ§йғЁеҲҶе·ҘжҘ�(yГЁ)й �(lЗҗng)еҹҹзҡ„й«ҳиҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮҸиҰҒжұӮгҖ�
з”�(chЗҺn)е“Ғд»Ӣзҙ�
е·ҘдҪңйӣ»жәҗ | Ubпј�15VDCВұ30% пј�8VпҪ�28Vпј� |
еҠҹиҖ—йӣ»жө� | вү�35mA |
е·ҘдҪңжә«еәҰ | пј�40в„ғпҪһ125в„ғпјҲй ӯйғЁпј� |
иҖҗжҢҜжҖ§иғҪ | жҢҜеӢ•(dГІng)пј�10Hz~2KHzпј�30gпјҢжІ–ж“�100g |
еҜҶе°ҒжҖ� | IP6813. |
йӣ»жәҗжҘөжҖ§дҝқиӯ�(hГ№) | жң� |
ијёеҮәзҹӯи·Ҝдҝқиӯ·(hГ№) | жң� |
зө•з·Јеј�(qiГЎng)еә� | 1000V 50Hzпј�1minпјҲйҖҡйҒ“иҲҮеӨ–ж®јпјү |
еҸҚиҪү(zhuЗҺn)иҪ�(zhuЗҺn)йҖҹеӮіж„ҹеҷЁз”ЁдәҺжӘўжё¬(cГЁ)ијӘи»ёзҡ„иҪү(zhuЗҺn)йҖҹе’Ңз·�(xiГ n)йҖҹеәҰпјҢйҖҡйҒҺ(guГІ)иЁ�(jГ¬)з®—иҷ•зҗҶд№ҹеҸҜеҫ—еҲ°иў«жё�(cГЁ)й«”зҡ„йҖҹеәҰгҖӮи©ІеӮіж„ҹеҷЁе…·еӮҷиүҜеҘҪзҡ„дҪҺй »е’Ңй«ҳй »зү№жҖ§гҖӮдҪҺй »еҸҜиҮ�0HzпјҢз”ЁдәҺж—ӢиҪ�(zhuЗҺn)ж©�(jД«)жў°зҡ„йӣ¶иҪү(zhuЗҺn)йҖҹйҮҸпјҢй«ҳиҮ�20KHz,еҸҜж»ҝ(mЗҺn)и¶ізө•еӨ§йғЁеҲҶе·ҘжҘ�(yГЁ)й �(lЗҗng)еҹҹзҡ„й«ҳиҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮҸиҰҒжұӮгҖӮз”ұдәҺYD69еҸҜзөҰеҮәе…·жңүдёҖе®ҡзӣёдҪҚе·®зҡ„е…©зЁ®иҪү(zhuЗҺn)йҖҹдҝЎиҷ�(hГ o)пјҢеӣ жӯӨеҸҜйҖ�(jГ¬n)иЎҢжӯЈеҸҚиҪү(zhuЗҺn)еҲӨеҲҘгҖӮе®үиЈқж–№дҫҝпјҢиҲҮжё¬(cГЁ)йҪ’ијӘдёҚжҺҘи§ёпјҢз„�(wГә)зЈЁжҗҚпјҢијёеҮәжіўеҪўзӮәж–№жіўпјҢеҚ з©әжҜ”зҙ„зӮә50%пјӣжё¬(cГЁ)йҖҹиҢғеңҚеҜ¬пјҢжә«еәҰйҒ©жҮ�(yД«ng)е»ЈпјҢжҠ—жҢҜжҖ§еј·(qiГЎng)пјҢжңүйӣ»жәҗжҘөжҖ§дҝқиӯ�(hГ№)е’ҢијёеҮәзҹӯи·Ҝдҝқиӯ�(hГ№)гҖ�
дәҢпјҡжҠҖиЎ�(shГ№)еҸғж•ё(shГ№)
1пјҺеӮіж„ҹеҷЁе®үиЈқ
в—� иў«жё¬(cГЁ)ж„ҹжҮү(yД«ng)й«”зӮәе°�(dЗҺo)зЈҒй«”пјҢдёҠжңүйҪ’жҲ–еҮ№ж§ҪгҖ�
е»әиӯ°пјҡжё¬(cГЁ)йҖҹйҪ’иј� жЁЎж•ё(shГ№)вү�1.7пјҢжқҗж–ҷзӮәе°�(dЗҺo)зЈҒдҪҺзўійӢј
жіЁпјҡйқһжЁҷ(biДҒo)йҪ’жҲ–ж§ҪиҲҮе№іж•ҙйқўеҜ¬еәҰдёҚзӯүе°Үе°�(dЗҺo)иҮҙжіўеҪўеҚ еҜ¬жҜ”зҡ„и®ҠеҢ–гҖ�
в—� е®үиЈқй–“йҡҷпј�0.5-2mm,е…ёеһӢеҖјзӮә1.0mm
жіЁпјҡеҸ–жұәдәҺиў«жё�(cГЁ)件зҡ„жҢҜеӢ•(dГІng)жғ…жіҒ
2пјҺеӮіж„ҹеҷЁијёеҮәзү№жҖ�
в—� й »йҹҝзү№жҖ§пјҡ0~20kHz
в—� ијёеҮәйҖҡйҒ“ж•�(shГ№)пјҡйӣҷйҖҡйҒ“
в—� ијёеҮәжіўеҪўпјҡж–№жіўпјҢдёҠеҚҮгҖҒдёӢйҷҚжІҝжҷ�(shГӯ)й–� 12ОјпҪ“В�40%
в—� ијёеҮәе№…еәҰпјҡй«ҳйӣ»е№іпјҡU-0.7пјҲUпјҡйӣ»жәҗйӣ»еЈ“пјүпјҢдҪҺйӣ»е№іпј�< 0.1V
в—� и„ҲжІ–еҚ з©әжҜ”пјҡ50пј…В�25пј�
в—� зӣёдҪҚе·®пјҡ 90Вұ30В°пјҲ第дёҖйҖҡйҒ“и¶…еүҚпј�
жіЁпјҡеҸ–жұәдәҺе®үиЈқж–№ејҸпјҢж—ӢиҪү(zhuЗҺn)件зҡ„ж—ӢиҪү(zhuЗҺn)ж–№еҗ‘пјҢжң¬еҸғж•ё(shГ№)йҒ©з”ЁдәҺжң¬иӘ�(shuЕҚ)жҳҺжӣё(shЕ«)ең–еӣӣиҲүдҫӢзҡ„е®үиЈқж–№еј�
в—� иІ�(fГ№)ијүиғҪеҠӣпјҡ Вұ20mA пјҲжңҖеӨ§пјү
в—� ијёеҮәйҳ»жҠ—пјҡпјң47О©
в—� дҫӣйӣ»йӣ»еЈ“пјҡUbпј�+24VDCпј�5VпҪ�26Vпј�
в—� еҠҹиҖ—йӣ»жөҒпјҡвү�35mA
в—� е·ҘдҪңжә«еәҰпјҡпјҚ40в„ғпҪһ+125в„�
в—� иҖҗжҢҜжҖ§иғҪпјҡжҢҜеӢ�(dГІng)пј�10Hz~2KHzпј�30gпјҢжІ–ж“�100g
в—� еҜҶе°ҒжҖ§пјҡ IP68
в—� йӣ»жәҗжҘөжҖ§дҝқиӯ�(hГ№)пјҡжңү
в—� ијёеҮәзҹӯи·Ҝдҝқиӯ·(hГ№)пјҡжңү
в—� зө•з·Јеј�(qiГЎng)еәҰпјҡ1000V 50Hzпј�1minпјҲйҖҡйҒ“иҲҮеӨ–ж®јпјү
в—� еӨ–ж®јжқҗж–ҷпјҡдёҚйҠ№йӢј304пјҲеҸҜжҢүз”ЁжҲ�(hГ№)иҰҒжұӮж”№з”Ёе…¶д»–жқҗж–ҷпј�
3пјҺеӨ–жҺҘйӣ»зәңеҸҠйҖЈжҺҘ
в—� еӮіж„ҹеҷЁеӨ–й…Қйӣ»зәңијёеҮәе®ҡзҫ�
з·�(xiГ n)иү� | еј•еҮәз·�(xiГ n)е®ҡзҫ© |
жЈ� | йӣ»жәҗпј�24V |
� | COM |
и—�(lГЎn) | OUT |
зҙ� | OUT |
еӨ–еұӨ | еұҸи”Ҫеұ� |
жіЁж„Ҹпјҡд»ҘеҜ�(shГӯ)зү©з·ҡ(xiГ n)жЁ�(biДҒo)зӮәжә–(zhЗ”n)
дёүпјҡе·ҘдҪңеҺҹзҗҶ
1пјҺиҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮҸеҺҹзҗ�
з•�(dДҒng)жё�(cГЁ)йҖҹйҪ’ијӘж—ӢиҪ�(zhuЗҺn)жҷ�(shГӯ)пјҢеӮіж„ҹеҷЁе°Үз”ў(chЗҺn)з”ҹй »зҺҮfпјҲHzпј�= nГ—m/60(nзӮәиҪү(zhuЗҺn)йҖҹпјҢPзӮәйҪ’ијӘйҪ’ж•�(shГ№))зҡ„ж–№жіўдҝЎиҷ�(hГ o)пјҢдҫӣж©�(jД«)и»�(chД“)йӣ»еӯҗжҺ§еҲ¶зі»зөұ(tЗ’ng)е°�(duГ¬)ж©�(jД«)и»�(chД“)йҖҹеәҰгҖҒжҹҙжІ№ж©ҹ(jД«)иҪ�(zhuЗҺn)йҖҹгҖҒйҖ�(jГ¬n)иЎҢйҮҮжЁЈжӘўжё�(cГЁ)гҖ�
ж„ҹжҮү(yД«ng)й«”еҝ…й ҲжҳҜе°�(dЗҺo)зЈҒй«”пјҢеҸҜд»ҘжҳҜеҮ№ж§ҪпјҢд№ҹеҸҜд»ҘжҳҜеҮёиө·зҡ„иһәйҮҳжҲ–йҪ’ијӘгҖ�
жҮ�(yД«ng)з”Ёжң¬еӮіж„ҹеҷЁжё¬(cГЁ)йҮҸиҪү(zhuЗҺn)йҖҹпјҢж¶үеҸҠеҲ°д»ҘдёӢе№ҫеҖ�(gГЁ)еҸғж•ё(shГ№)пј�
mвҖ”иў«жё�(cГЁ)ж—ӢиҪү(zhuЗҺn)е°�(dЗҺo)зЈҒй«”дёҠж„ҹжҮ�(yД«ng)й«”зҡ„еҖ�(gГЁ)ж•�(shГ№)
nвҖ”иҪү(zhuЗҺn)йҖ�
fвҖ”ијёе…ҘдҝЎиҷ�(hГ o)й »зҺҮ
sвҖ”иЁӯ(shГЁ)е®ҡзҡ„е„ҖиЎЁзі»ж•�(shГ№)(дҫқиҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮ�?jД«)xиЎЁзү№жҖ§иҖҢе®ҡпјҢйғЁеҲҶиҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮ�?jД«)xиЎЁзӣҙжҺҘиЁӯ(shГЁ)е®ҡйҪ’ж•�(shГ№)пјҢи«Ӣ(qЗҗng)дҫқз…§йҒёз”Ёзҡ„иҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮ�?jД«)xиЎЁдҪҝз”ЁиӘӘ(shuЕҚ)жҳҺжӣё(shЕ«)йҒёе®ҡе„ҖиЎЁзі»ж•�(shГ№))
е…¶й—ң(guДҒn)зі»еҰӮдёӢпјҡ S=
n = s f = 60 f / m
е®ҡеҘҪдёҖеҖ�(gГЁ)жё�(cГЁ)йҮҸзі»зө�(tЗ’ng)зҡ„ж„ҹжҮ�(yД«ng)й«”еҖ�(gГЁ)ж•�(shГ№)д»ҘеҗҺпјҢе„ҖиЎЁиЁӯ(shГЁ)е®ҡзі»ж•�(shГ№)е°ұе·Ізўәе®ҡеҘҪпјҢж №ж“ҡ(jГ№)жҜҸдёҖйҖҡйҒ“зҡ„еӮіж„ҹеҷЁжүҖе°�(duГ¬)зҡ„ж„ҹжҮ�(yД«ng)й«”еҖ�(gГЁ)ж•�(shГ№)зўәе®ҡеҘҪеҗ„йҖҡйҒ“зҡ„зі»ж•�(shГ№)гҖ�
дҫӢеҰӮпјҢе°Қ(duГ¬)дёҖеҖ�(gГЁ)ж—ӢиҪү(zhuЗҺn)и»ёйҖ�(jГ¬n)иЎҢиҪү(zhuЗҺn)йҖҹжё¬(cГЁ)йҮҸпјҢи»ёдёҠжңүдёҖеҖ�(gГЁ)30йҪ’йҹіијӘпјҢзӣёз•¶(dДҒng)дәҺж„ҹжҮ�(yД«ng)й«”йҪ’ ж•�(shГ№) Z = 30 пјҢйӮЈд№ҲеӮіж„ҹеҷЁжҜҸйҖҡйҒ“ијёеҮәзҡ„й »зҺҮзӮә f = (30/60)n,иҪ�(zhuЗҺn)йҖ� n = 2fпјҢеҚіжё�(cГЁ)еҮәзҡ„й »зҺҮж•�(shГ№)иҰҒд№ҳд»�2жүҚзӯүдәҺеҜҰ(shГӯ)йҡӣиҪү(zhuЗҺn)йҖҹгҖӮе°ҮиҪ�(zhuЗҺn)йҖҹжё¬(cГЁ)йҮ�?jД«)xеҷЁзі»ж•�(shГ№)иЁ�(shГЁ)е®ҡеңЁ2 пјҢеҚіs = 2 пјҢйӮЈе°ұеҸҜд»ҘзӣҙжҺҘйЎҜзӨәиҪү(zhuЗҺn)еӯҗзҡ„еҜ�(shГӯ)йҡӣиҪү(zhuЗҺn)йҖҹгҖӮеҗҢжЁЈпјҢеҰӮжһңжҜҸиҪү(zhuЗҺn)з”�(chЗҺn)з”�2еҖ�(gГЁ)дҝЎиҷҹ(hГ o)пјҢеүҮиЁ�(shГЁ)зі»ж•ё(shГ№) s = 30 еҚіеҸҜпјҢе…¶дҪҷйЎһ(lГЁi)жҺЁгҖ�
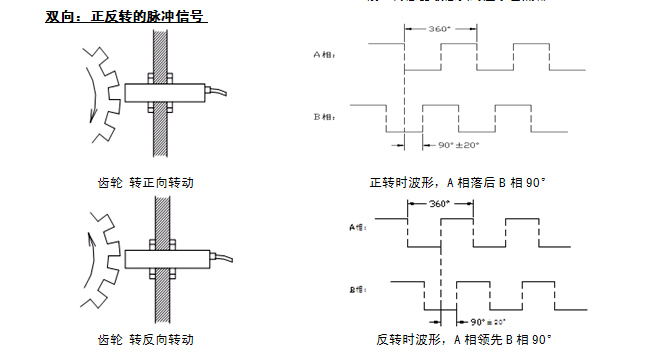
3пјҺжӯЈеҸҚиҪү(zhuЗҺn)еҲӨеҲҘжё�(cГЁ)йҮҸеҺҹзҗ�
жҮ�(yД«ng)з”ЁйңҚзҲҫйӣҷйҖҡйҒ“еӮіж„ҹеҷЁеҸҜж–№дҫҝзҡ„йҖ�(jГ¬n)иЎҢжӯЈеҸҚиҪү(zhuЗҺn)еҲӨеҲҘгҖ�
жҢ� жң¬иӘӘ(shuЕҚ)жҳҺжӣё(shЕ«)еӣӣдёӯжҮ�(yД«ng)з”ЁзӨәдҫӢе®үиЈқпјҢз•�(dДҒng)ж—ӢиҪү(zhuЗҺn)ж–№еҗ‘еҰӮең–еӣӣжүҖзӨәе®ҡзҫ©зӮәжӯЈиҪү(zhuЗҺn)пјҢијёеҮәжіўеҪўзӮәйҖҡйҒ“1и¶…еүҚйҖҡйҒ“2 90еәҰпјҢжіўеҪўзӨәж„Ҹең–еҰӮдёӢжүҖзӨәпјҡ
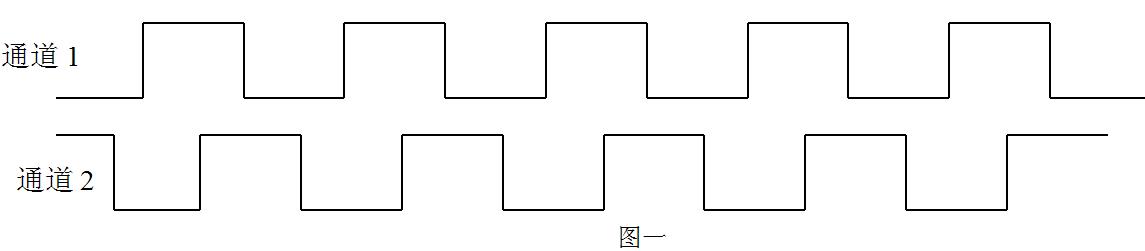
з•�(dДҒng)ж—ӢиҪү(zhuЗҺn)ж–№еҗ‘иҲҮең–еӣ� жүҖзӨәж–№еҗ‘зӣёеҸҚжҷӮ(shГӯ)пјҢйҖҡйҒ“2жіўеҪўе°Үи¶…еүҚйҖҡйҒ“1жіўеҪў90еәҰпјҢжіўеҪўзӨәж„Ҹең–еҰӮдёӢжүҖзӨәпјҡ

з”ұдёҠең–еҸҜзҹҘпјҢе°�(duГ¬)йҖҡйҒ“1гҖ�2зҡ„жіўеҪўйҖ�(jГ¬n)иЎҢзӣёдҪҚй‘’еҲҘпјҢеҚіеҸҜйҖ�(jГ¬n)иЎҢжӯЈеҸҚиҪү(zhuЗҺn)еҲӨеҲҘгҖ�



йӣҷйҖҡйҒ“иҪү(zhuЗҺn)йҖҹеӮіж„ҹеҷЁ")
